11月15日-17日,第62届中国高等教育博览会(以下简称“高博会”)在重庆举行。党委常委、副校长赵玉新,校长助理、本科生院常务副院长耿敬带队参会。赵玉新代表学校在第七届高等工程教育大会上作题为《深化新工科建设,培养新时代“工学”人才》的主旨报告,与参会专家围绕工程教育改革发展等议题进行深入交流,并介绍学校展位。

报告深度解读了新时代“工学”人才培养内涵,分享了学校聚焦新质新域,通过设立未来技术学院等变革组织模式,聚焦“金专业、金课程、金教师、金环境”开展专项改革,培养具有创新精神和实践能力的高素质新时代“工学”人才。
在全国高校教务处长论坛环节,学校有关负责人推介了新时代“工学”人才培养模式。

参展现场,学校通过“展板+展品”全面展示了“工学”人才培养的理念及成果。展板围绕总书记关怀、“大思政课”教育体系、新时代“工学”人才培养、教育教学课程改革、拔尖创新培养等五个方面,展出近年来学校聚焦高等教育教学综合改革做出系列探索,打造哈工程人才培养新范式。

中国高等教育学会副会长管培俊、张大良等领导在学校展位参观指导,听取了学校新时代“工学”人才培养的新举措新成果、未来技术学院建设成效,观看了学校参展科创作品并了解其在本科实践课程中的应用情况,对学校人才培养工作给予高度肯定。

本次学校展出展品均为近年来我校学生参与国内外赛事获奖的科创作品,以及部分课程的教学实践成果,其中包括“星海”自主作业水下机器人、“星魂”AUV、履带式机械车、水下对讲机等。这些具有鲜明海洋特色的科教、产教融合育人成果实物展品,吸引了许多参展观众。计算机科学与技术学院在展会独立设展,展示学校人工智能、虚拟仿真等方向的教育教学改革成果。
中国高等教育博览会是由中国高等教育学会主办,全国高等教育领域内规模最大影响力最广泛的综合性品牌博览会。本届高博会以“职普融通·产教融合·科教融汇”为主题,共有参展企业700余家,参会企业约5000余家,参会院校1000余所,汇聚了来自全国各地的高校领导、一线教师和管理人员等其他参会观众约5万人次。
学校深入学习贯彻习近平总书记视察学校重要指示精神,紧贴强国强军需要,一体推进教育发展、科技创新、人才培养,以新工科建设为牵引,从催生船海领域新质生产力的供给侧发力,不断探索拔尖创新人才自主培养哈工程范式。在新一轮本科教育教学审核评估中,学校可靠顶用、拔尖创新的新时代“工学”人才培养模式,受到审核评估专家组高度评价。
展会期间,赵玉新还走访调研了重庆校友会。
参展作品一览

展品名称:“星魂”水下机器人
展品成果:第三届世界大学生水下机器人大赛国际一等奖
展品简介:由哈工程本科生团队研发的水下自主航行器,可自主进行姿态调整、水下定姿定深、水下目标识别,及智能检测与跟踪。该机器人能够按照预设的轨迹进行水下自主航行,也可在无人预先干预的情况下,通过视觉进行水下管道的自主巡检工作。

展品名称:“星海-W12”微小型自主作业水下机器人
展品成果:第十二届海洋航行器大赛全国一等奖
展品简介:该机器人面向水下航行器设计与自主作业技术发展需求,具有自主姿态调整、水下自由度运动、水下目标识别与跟踪等功能。外形采用开架式设计,可保证至少30m水深正常工作,可实现航行器六自由度运动;模块化电路设计,保证系统稳定性与信息可靠性;能实现三维空间全向运动,水下拍照数据采集功能等。

展品名称:《海洋机器人初级设计与实践》课程——海洋机器人
课程简介:该课程以海洋机器人设计为导向,重构传统理论课程知识体系,学生通过小组合作形式完成机器人设计制作。运用趣味评价机制助推创新实践发展,采用以赛代考的考核机制,培养学生应用海洋工程、机械、等知识解决海洋智能工程问题的综合实践和创新能力。
展品简介:本作品是为水下作业设计的,分为水下本体与陆上人机交互系统两个部分。其本体配备6个推进器,可实现六个方向的精确移动,确保在水下复杂环境中的稳定性和操控性。前部配备机械手可以抓取、搬运水下物体,适用于海底取样等任务。其配备高清摄像头,可实时传输水下影像,便于操作人员观察和操作,实现精准作业。

展品名称:《水下软体机器人技术》课程——软体蝠鲼机器鱼
课程简介:该课程通过实践环节拓展学生对新型水下机器人的思维,培养学生掌握多学科交叉学习能力,掌握驱动、传感的理论和器件设计制造方法,初步掌握水下软体机器人建模方法,初步具备深海、水下等多场景下软体机器人样机构造、系统集成、控制能力。
展品简介:该机器人的灵感源自蝠鲼的生物力学原理,实现了水中的自由悬浮与推进。其采用介电弹性体和离子导电水凝胶等创新材料,这些材料能够响应外部电压刺激并产生形变,从而驱动机器人运动。其独特设计利用了周围的海水作为电极,具备自供电能力,成本降低且环境耐受性强,为野外勘探、海洋科学研究等领域提供了全新的解决方案。

展品名称:《水声通信原理与实践》——水下对讲机
课程简介:该课程是一门有关水声通信系统设计与开发的专业课程,围绕水声信道的特殊性,系统地介绍水声通信的基本原理、方法及系统开发技术,培养学生运用水声通信技术与方法解决复杂工程问题的能力。
展品简介:该设备分为面罩部分和对讲部分,使用人通过佩戴面罩进行声音输入和输出,麦克风将人声信号输出后,对讲部分负责声信号的调制与解调,将人声信号大幅度提高,使声信号在水下的传播距离达到上千米,耳麦将传输回来的声音解调成人类可以识别的声音,从而实现通讯功能。同时,对讲机系统采用带通滤波的原理,进行水下低频降噪,增加语音的清晰度。

展品名称:《工程认知与实践》课程——折纸模块机械臂
课程简介:该课程是对基础工程训练课程进行重构,提出“一主体-两提升-三强化”课程育人理念。《工程认知与实践(一)》以固定项目研发为主线,使学生主动学习并掌握相关工艺知识和技能,增强创新能力;《工程认知与实践(二)》以引导型项目为基础,鼓励学生开展自主创新项目研发,培养学生解决复杂工程问题的创造能力,为后续参与高水平科研工作奠定基础。
展品简介:该展品采用Kresling折纸模块,各个模块易于拆卸,得益于该折纸结构的耦合旋转-收缩的特征,机械臂伸缩性能好,可以根据调整躯干伸缩程度改变机械爪的抓取角度,无需额外的旋转模块。它的重量远小于传统刚性机械臂,采用了操作简易的线驱动模式,更适配于小型无人飞行器的空中抓取任务等。

展品名称:《工程系统设计》课程——履带式机械车
课程简介:该课程采用项目式教学方式,基于工程系统设计全流程,将《机械设计》《产品设计》《工程制图》《机电一体化》课程重塑知识体系,以设计项目“履带式机械车”实施过程为主线,重点考核设计结果,全程监测成效,模拟真实设计项目过程“边做边练”。
展品简介:作品结合了履带车与机械臂结构,机械臂具备多个自由度,能够灵活执行各种复杂的任务,适合完成多角度抓取和搬运操作。其控制核心是 Arduino 控制板,作为小车的大脑,负责整体的移动和机械臂的控制。履带车底盘为机械臂提供了灵活的移动平台,能够适应不同的地形,使其在多种场景中执行任务。
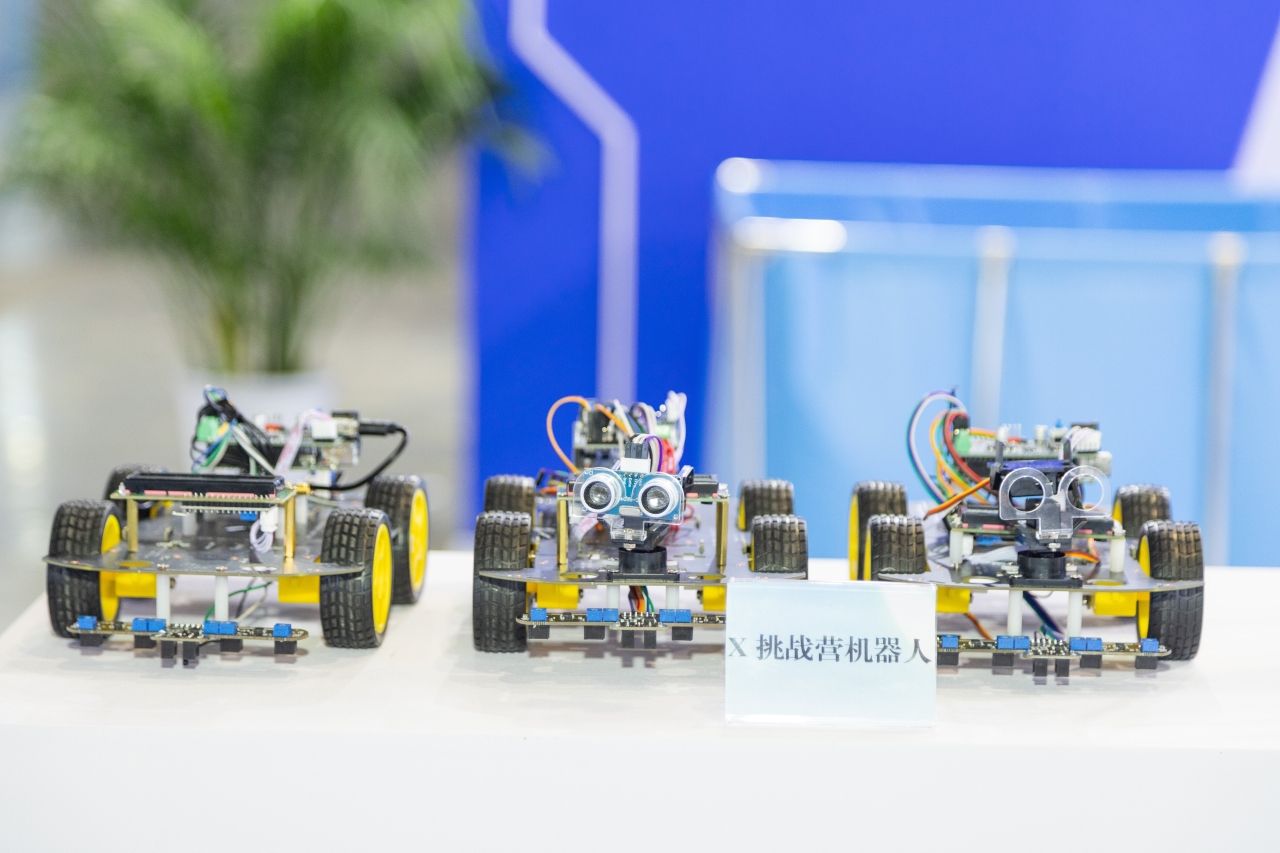
展品名称:“X挑战营”项目——视觉避障车
课程简介:该项目是未来技术学院招生选拔环节之一,新生在大学入学前参加“X挑战营”项目,进行为期3天的智能车制作。整个营训期间专家将通过学生的整体表现,综合考查学生是否具有成为智慧海洋未来技术领军人才的潜质。通过考核的学生将进入未来技术学院,以智慧海洋技术为专业进行本博贯通培养。
展品简介:小车以Arduino为控制单元,在硬件上配备了灰度传感器、超声波传感器等多类感知单元,实现了循迹、超声波避障等功能,并且做到实时显示小车的左右轮速、运动时间等状态信息。程序设计上使用了PID控制算法,提高了巡轨的稳定性,同时使用的陀螺仪进行小车姿态的感知,增强小车的灵活性和抗干扰能力。




 微信
微信 手机版
手机版