在崎岖不平的道路灵活旋转、跳跃、爬坡过坎毫不费力,哈工程本科生研发的核电领域智能巡检机器人,能在高辐射剂量核环境下对核电站核心设备、管道进行日常巡检,1台机器人可抵100个人的工作量。项目团队获13项发明专利、4项软件著作、2篇高质量论文,国际国内行业领域内顶级专家学者认可推荐,以科技创新为核电安全护航!

“无论什么时候,无论什么困难,老师都会想办法帮我们解决。在这片科技创新的沃土上,科技类社团有了成长空间,爱好科创的学生们有了展示的平台,一个个创新梦想萌芽、生长。”在学校创新创业教育工作推进会上,创翼科技社负责人陈阳作为学生代表,向全校师生讲述了自己从一个技术小白到站上国赛特等奖的领奖台的创新经历。他带领团队设计的核电领域智能巡检机器人获第十八届“挑战杯”全国大学生课外学术科技作品竞赛特等奖,成功的背后,是哈工程青年树牢科技报国志的创新故事。
参观核电站萌生创新金点子
“核电站反应堆压力容器是核电站的‘心脏’,关系着核电站的正常运行,但是对于它的检测始终存在维护难度大、风险高等问题,检查装备一直是业界的一大难点。”
2020年秋天,还是大一学生的智能学院机器人工程专业2020级本科生陈阳与同学们,在张兰勇老师的带领下,第一次来到大亚湾核电站,了解核能对于国家经济发展的重要性。听到工程师王可庆关于设备检测机器人的介绍,彼时刚刚加入创翼科技社的他,在心里种下了科技创新的种子
那一次,陈阳和同学们了解到为了保证核电站的安全和稳定,需要定期对压力容器进行监测。目前这些工作主要依靠人工或者传统的机器人完成。人工巡检时每个人每周只能最多工作4个小时,而常用的传统履带式核电检测机器人存在地形适应性弱、复用性差、抗辐射性能差等缺点,严重耗费人力物力。
能不能开发一款高性能核电机器人来解放人力,既能抵抗高辐射环境对电子系统的影响,在结构复杂的压力容器内灵活运动自动循迹,又能完成日常实时巡检任务呢?此时已经是创翼科技社负责人的陈阳带着这个想法,敲开了张兰勇办公室的大门。
“将技术与行业需求相结合搞创新,这个想法可行。”张兰勇鼓励陈阳大胆尝试,放手去做。

于是,陈阳组建了一支由不同学院、不同专业的本科生组成的科创团队,开始了长达两年的核电领域巡检机器人的研究。团队分为机械、嵌入式、视觉感知三个技术组别,成员均来自荣获“小平科技创新团队”的创翼科技社。陈阳和廖雨菲来自智能学院,负责控制算法研究;古翱翔来自物理学院,主要负责视觉算法的创新设计;朱一达来自南安普顿海洋工程联合学院,负责研究机械结构。
“这是一个复杂的学科交叉问题,但是我们相信,一定能克服困难,做一个机器人出来!”陈阳说。
打造轮腿结构身体灵活的机器人
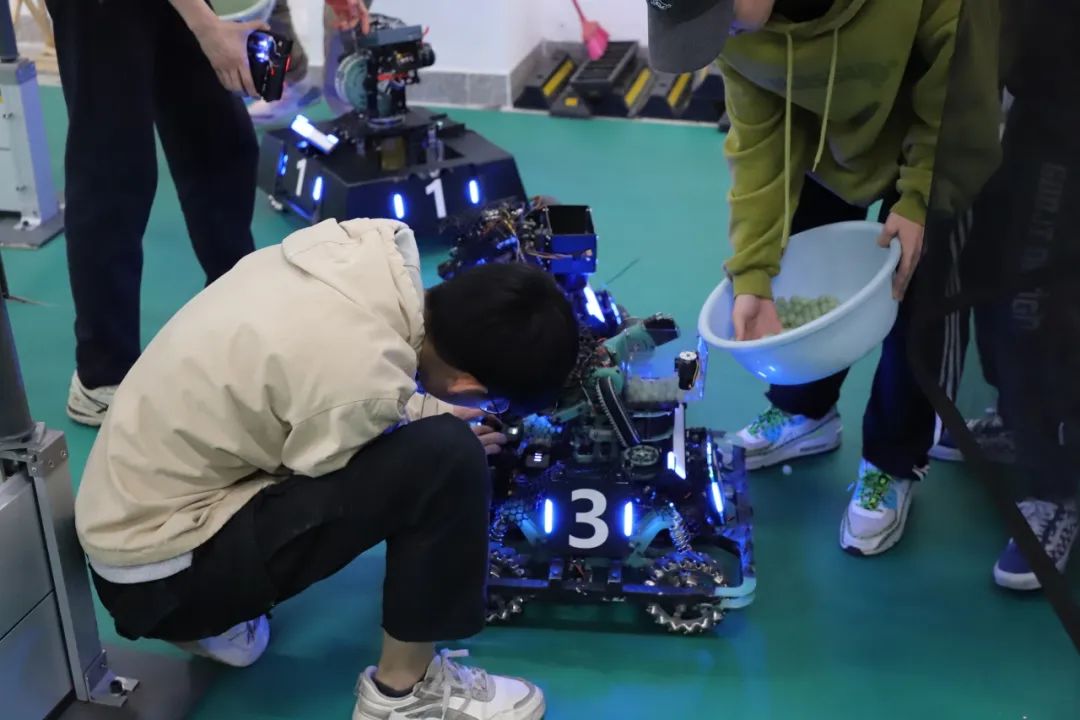
影视剧中,赛车倾斜车身在沟壑和台阶中惊险穿过的镜头让人捏一把汗。团队制作的核电巡检机器人,能够通过改变腿的长度,不倾斜车身也能在逼仄狭窄的台阶和布满栅格板的空间内平稳行进
在“挑战杯”决赛的路演现场,机器人行云流水的操作让评委眼前一亮。“我们是为数不多将实物作品‘搬’到现场的队伍,得到了观众们的点赞。”陈阳说。
什么结构能更加适应核电站的复杂环境?他曾经参加过的RoboMaster机甲大师对抗赛中,负责进攻的步兵机器人高速度、高效率和低噪声的轮式底盘结构给了他设计灵感。团队创新设计了五连杆轮腿底盘结构,结合轮与腿两种构型的优点,为机器人打造了灵活的“身体”。机器人五连杆的构造能更好地控制腿部伸缩高度,腿部最大延伸高度近半米,最大可以跳跃0.35米高的台阶,让机器人运动时更加灵活平稳,更适应复杂地形。
“就像人不慎踩到一块冰或者走路时突然被推了一下,需要马上调整身体防止摔倒,机器人要对遇到的外界干扰能‘条件反射’地做出调整。”廖雨菲说。
五连杆的轮腿底盘结构对控制的要求很高,算法设计是机器人设计的核心。为此,团队花费大半年时间集中开展被动态势感知的算法创新与验证。融合了多个调节器、控制器和虚拟模型,又加入航向角控制、横滚角补偿、腿长控制等算法,保持了机器人底盘的平衡、双腿的协调和灵活运动。“机器人在正常工作状态下,人用脚使劲踢也不会倒,不会因为一些外界干扰影响正常工作状况。”陈阳说。
除了提升控制功能,还要让机器人拥有 “大脑”和“眼睛”,团队创新设计了主动态势感知系统,能让机器人主动感知周围环境。进入核电站厂房后,机器人通过搭载的相机、激光雷达以及深度学习等算法自主避障、跟踪追踪等。“模块化、插件式的设计,让机器人根据不同需要更新多种功能,应用场景更广。”古翱翔说。
为了提高底盘的灵活性,提高其能量利用效率,团队为机器人设计了专用的控制板、电源管理板和超级电容模块。团队设计的核电领域巡检机器人可飞跃0.75米宽的台阶,最快速度可达到每秒5米,最大爬坡角度达到45度,机器人可在核电站内完成日常仪器仪表的数值读取、管道异物勘测等人力难及区域的检测。
无数个“再试一次”成就“六边形战队”
哈尔滨工程大学61号楼,有近400平方米的实践创新区域供学生们进行科创实验,这里是团队的“大本营”,造型精美、功能齐全的机器人就在这里诞生。

“这不是一场单打独斗,我们需要通力合作。”陈阳说。机器人共需10个电机来作业控制,“不同的作业控制对于电机扭矩的要求不同,如果达不到要求,可能造成电机烧毁,机器人‘罢工’。”在两款电机的选型上,团队总共进行7次迭代,终于解决了电压不稳、扭矩不足等情况。
在调试机器人时又遇到了轮子打滑严重的问题,让研究一度停滞不前。“坚持不住的时候,就告诉自己,再多试一次,办法总比困难多。”陈阳说。
通过慢速回放机器人运动的录像,团队察觉到是控制器的算法出现了偏差。陈阳和廖雨菲又重新调整了10余次,才解决了这一问题。“除了控制方面的改进,结构组也要做出调整,把轮子从原来的小轮径换成合适的大轮径增大摩擦性,让机器人行驶更稳定。”朱一达说。
机器人的从无到有是一个系统工程,团队成员的系统思维和专业能力在研究中得到了提升。“除了本专业知识,我们还要对控制、电路等技术有一定掌握,自己的知识面更加广了。”古翱翔说。
领先技术获得院士专家点赞
2023年初,团队设计的巡检机器人在核电站环境内试用。进入核电站环境,抗辐射是首要条件。“如果核辐射太大,会直接击穿屏障导致元器件损坏,机器人就会直接‘瘫痪’。”陈阳说。
在研究过程中,校内校外的专家给了团队很多建议和帮助。团队成员中虽然没有核专业的学生,学校核学院刘永阔老师仍无私地为团队解答核安全的问题;黑龙江省原子能研究院姚钢老师为团队提出选择防护屏蔽材料的建议;中广核检测公司的工程师也对项目进行深入指导,机器人技术被中广核检测技术有限公司等9家企业应用。
团队选择以铝方为主梁,碳纤维板作为结构减轻机器人的重量,同时采用一体化设计,整体使用抗辐射元件,外部涂上抗辐射涂层,最大程度提高抗辐射性。机器人本身的质量在10-15千克,最大负重可达25千克。经过测试,整机性能相较于市面上已有的核电检测机器人已达国内外先进水平。
除了核电厂检测,巡检机器人还可以在矿道检测、环境监测等恶劣或复杂环境下代替人类完成勘测、搜救、侦察、运输等任务,具有广阔的应用前景。
在得知团队的研究成果后,欧洲科学院院士石碰教授和加拿大工程院院士杨春生教授表示认可:“工作中充满了创新精神和实践精神,具有一定的社会意义和挑战性。”曾获央视“大国工匠”专题报道的中国广核集团运营公司首席维修技师陈永伟认为该项目具有非常好的工程应用价值。
“在推进新型工业化,加快发展新质生产力的形势下,哈工程教师和学子都将大有可为。”张兰勇说。如今,即将本科毕业的陈阳选择继续留在哈尔滨工程大学读研深造,从事智能机器人相关研究,他说:“我将牢记总书记的殷切嘱托,刻苦学习钻研,勇攀科学高峰,锻炼提升工程师思维和能力,为国家和社会发展做出自己的贡献。”




 微信
微信 手机版
手机版