日前,第十四届“挑战杯”中航工业全国大学生课外学术科技作品竞赛决赛在广州闭幕。我校自动化学院胡璞等人的作品《多功能海洋环境监测平台》获二等奖,动力学院周帅宇等人的作品《基于热泵系统的供热供冷装置》、信通学院陈尚泽等人的作品《水下智能自主搜救机器人》、王森等人的作品《海浪能驱动长航时无人运动航行器》获三等奖,我校获“校级优秀组织奖”。
“挑战杯”全国大学生课外学术科技作品竞赛由共青团中央、中国科协、教育部、全国学联和承办地政府共同主办,是全国规模最大,最具影响力的大学生科技学术创新赛事,被誉为当代大学生科技学术创新的“奥林匹克”。本届大赛由广东工业大学和香港科技大学联合承办,初赛和复赛阶段共有2000余所高校向所在省区和全国大赛组委会提交了作品。经过层层选拔,318所高校的783件作品进入终审决赛。

多功能海洋环境监测平台
多功能海洋环境监测平台能够实时、连续对局部海域环境进行监测。可监测项目包括波高、波向、水温、气温、气压、风速、风向等,若搭载溢油传感器还可以实现对海面的溢油检测。
监测平台的供电系统由两个12V、20AH的铅蓄电池和6块20W的太阳能电池板组成。白天,阳光照射在太阳能电池板上,电池板上的单晶硅吸收光子的能量后产生电能,并存储到铅蓄电池中。两个铅蓄电池串联成为一个24V的电源,经过稳压处理后直接给系统供电。经过计算可知,即使在连续阴雨、电池板所能吸收的光能很少的情况下,供电系统也能保证系统连续工作40天以上。
多功能海洋环境监测平台采用高强度透明球形有机玻璃罩,通透性好,抗撞击和抗刺穿能力强。整个系统外形采用球形设计,具有良好的随波性。球体下方采用锚链设计,以保持平台的正浮姿态并提高抗倾覆能力。球体下壳采用橘红色的设计,夜晚配有红色频闪灯,起到一定的警示作用。系统外部还配有橡胶防撞装置,以减小海面漂浮物对系统撞击带来的损坏。
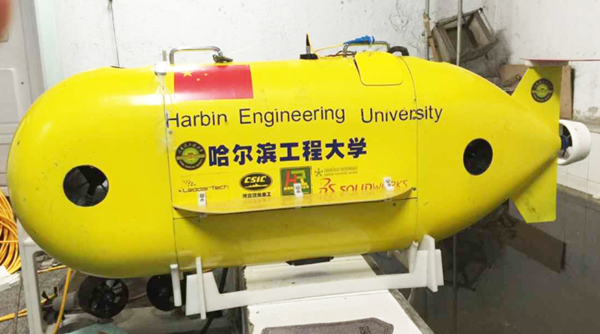
水下智能自主搜救机器人
水下智能自主搜救机器人是一种工作于水下的极限作业机器人,能潜入水中代替人完成搜救工作。机器人采用永磁式平面磁传动推进器,利用磁铁异性相吸的原理进行传动,以静密封替代传统动密封,避免了因密封产生摩擦生热,大大提高了机器人的可靠性。在此基础上,添加了水声探测、图像跟踪识别、惯性导航等先进技术,使该机器人可以进行复杂的智能搜救工作。
水下智能自主搜救机器人利用发生换能器进行水声定位,利用水听器进行声源定位与追踪;可以在水下进行图像处理;采用流线型设计,保证其灵活性;用碳纤维材料制作机身,质量很轻。
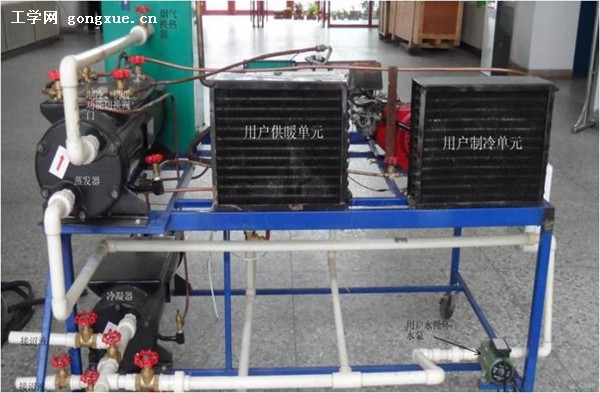
基于热泵系统的供热供冷装置
基于热泵系统的供热供冷装置由沼气机热泵回路、用户系统回路、太阳能沼气池供应回路和沼气机余热余质综合利用回路构成。其基本工作流程为:冬季,沼气经过净化后,作为沼气机的燃料,驱动整个热泵系统工作,将热量传递给用户供暖水,达到冬季供暖的目的;太阳能集热器保证冬季沼气池的产气温。夏季,利用四通转向阀使制冷剂流向转变,沼气机驱动热泵工作时,则将冷量传递给用户,实现夏季制冷目的。过渡季节,利用安装在沼气机上的盘式发电机实现电量的供应;全年将沼气机的尾气排向温室大棚,从而实现沼气机尾气的余质回收。
该装置可以实现以下创新点:热量梯级回收利用;废气作为“气肥”通往温室大棚,降低碳排放;沼渣归田,给大棚农作物提供无机盐,实现废物再利用;沼气发动机与盘式发电机配合工作,提供生活用电。

海浪能驱动长航时无人运动航行器
海浪能驱动长航时无人运动航行器是由水面母船和水下牵引机通过绳缆连接而成的一种新型移动观测平台,能将波浪起伏运动直接转换为前向推进运动,能够完成长时序、大航程的海洋环境观测任务,且无需提供额外动力。水下牵引机的水翼随着波浪的起伏运动而摆动,其受到的海水的作用力分解为水阻力和前向推力,该前向推力为波浪动力滑翔机提供了前向运行的驱动力。
由于整个系统可常年在水中航行,可用于实现海洋信息收集,海洋生物跟踪、海洋资源探索。该航行器采用自然能源推进,具有低噪声特性,具有良好的隐蔽性,在军事上可以实现秘密侦查、海域警戒等任务。




 微信
微信 手机版
手机版