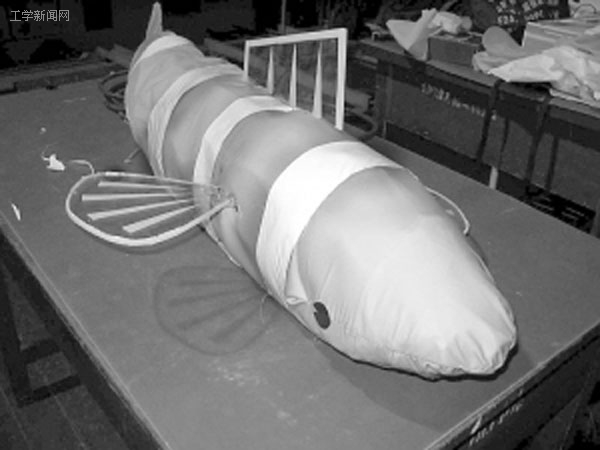
近日,一条身穿黄白条纹外套、长约1米的“小丑鱼”游进了哈尔滨工程大学实验室的水池。这条“电磁仿生鱼”将来还要游进深海,去观察鱼类的生活习性,探测海底世界等。
23日,在哈尔滨工程大学103实验室,记者见到了这条“小丑鱼”。从水面俯视,“小丑鱼”很漂亮,体色是鲜艳的桔黄色,身上有白色条纹,两个胸鳍呈淡黄色。在鱼背上有一根黑色的近3米长的控制线,另一端和控制器相连。通过控制器,“小丑鱼”可以摇摆着向前游动、转弯、潜水。
“研制‘小丑鱼’就是想验证一下鱼尾巴的功能。”3位研制者郭冰洁、唐旭东、李岳明告诉记者,他们3人都是25岁,是哈尔滨工程大学船舶工程学院的研二学生,主攻方向是潜水器材制造与控制。导师在授课时提到“鱼在水中摇尾巴是消耗阻力最小、最快捷的运动方式”,于是,他们3人不谋而合地有了制作仿生鱼的想法。
从2006年5月起,他们3人就着手研发了。第一步是绘图,3个人从3000多种鱼中,选中了可爱的“小丑鱼”。然后,根据比例,绘制了“小丑鱼”的上、左、右3张剖面图。经过20多天的计算、测量,他们在电脑上完成了“小丑鱼”立体模型。为了找到能将小鱼内部带电的动力源密封严密的鱼表皮,他们用了40天的时间,尝试了30多种材料,最终确定了硅胶。
“小丑鱼”组装完成了,他们迫不及待地把它放进水里。但第一次下水,“小丑鱼”的鱼尾巴没能按照预想进行摆动。为此,3个人不得不给“小丑鱼”开膛破肚,查找病因。原来是鱼尾处的3个电磁铁有死点。2006年年底,游泳棒、善潜水的“小丑鱼”终于诞生了。
他们说,与传统的仿生鱼采用机械电力装置作为推进方式相比,“小丑鱼”仿生器采用电磁铁作为动力源,直接由电磁铁产生的吸合力带动鱼尾,通过控制两组电磁铁产的周期性吸合,实现鱼尾摆动,使其运动更加灵活、效率更高、噪音更低。
现在,他们3人又有了新的想法。在“小丑鱼”身上安装智能控制、通信、导航、目标探测等设备,让“小丑鱼”在海洋生物观察、海洋救捞、海洋地形勘测、海洋矿藏探测、海洋污染监测等多领域发挥作用。




 微信
微信 手机版
手机版